概述
核心定义
线性规划(Linear Programming, LP)线性约束条件下,求解线性目标函数的最大值或最小值。
历史背景
线性规划的诞生与二战期间的军事需求密切相关:
军事问题:
- 如何最有效地分配有限的军事资源(人力、物资、武器)?
- 如何优化运输路线,在最短时间内将补给送到前线?
- 如何安排生产计划,在有限的工厂产能下最大化武器产量?
经济问题:
- 战时经济需要配给制度,如何公平且高效地分配稀缺资源?
- 如何在原材料短缺的情况下,最大化工业产出?
1947年,美国数学家乔治·丹齐格为美国空军开发资源调度方法时,正式提出了线性规划理论和单纯形算法,用于解决飞机、燃油、人员等战争资源的最优分配问题。这一突破将原本依赖经验的决策提升为科学的数学优化。战后,线性规划迅速从军事领域扩展到民用经济,苏联数学家康托罗维奇也独立发展了类似理论,两人因此共享了1975年诺贝尔经济学奖。
如今,线性规划已渗透到生产调度、物流运输、金融投资、能源管理等各个领域,成为现代企业科学管理和政府资源优化配置的基础工具,每年在全球创造数千亿美元的经济价值。从战时的弹药配送到今日的电商物流路径规划,线性规划始终是连接数学理论与现实决策的重要桥梁。
数学模型
一般数学模型
\begin{align}
\max(\text{或 } \min) \quad & z = \sum_{j=1}^{n} c_j x_j \\
\text{s.t.} \quad & \left\{
\begin{aligned}
& \sum_{j=1}^{n} a_{ij} x_j \leq (\text{或 } =, \geq) b_i \quad (i = 1, \cdots, m) \\
& x_j \geq 0 \quad (j = 1, \cdots, n)
\end{aligned}
\right.
\end{align}
矩阵形式:
\begin{align}
\max(\text{或 } \min) \quad & z = \mathbf{c}^T \mathbf{x} \\
\text{s.t.} \quad & \left\{
\begin{aligned}
& \mathbf{A} \mathbf{x} \leq (\text{或 } =, \geq) \mathbf{b} \\
& \mathbf{x} \geq \mathbf{0}
\end{aligned}
\right.
\end{align}
其中:
- $\mathbf{x} = (x_1, x_2, \cdots, x_n)^\mathrm{T} \in \mathbb{R}^n$为决策变量向量
- $\mathbf{c} = (c_1, c_2, \cdots, c_n)^\mathrm{T} \in \mathbb{R}^n$ 为价值系数向量
- $A = (a_{ij})_{m \times n} \in \mathbb{R}^{m \times n}$ 为约束系数矩阵
- $\mathbf{b} = (b_1, b_2, \cdots, b_m)^\mathrm{T} \in \mathbb{R}^m$ 为资源向量
三个关键要素
| 要素 | 示例 | 含义 |
|---|---|---|
| 决策变量 | $x_1, x_2, \ldots, x_n$ | 需要求解的未知量 |
| 目标函数 | $z = c_1 x_1 + c_2 x_2 + \cdots + c_n x_n$ | 线性函数,要最大化或最小化 |
| 约束条件 | $A\mathbf{x} \leq \mathbf{b}, \quad \mathbf{x} \geq 0$ | 线性不等式或等式 |
标准形式
为了让同一套算法、同一套理论、同一套软件能毫无歧义地处理所有 LP 问题,规定的线性规划问题标准形式如下:
\begin{align}
\max \quad & z = \sum_{j=1}^{n} c_j x_j \\
\text{s.t.} \quad & \left\{
\begin{aligned}
& \sum_{j=1}^{n} a_{ij} x_j = b_i \quad (i = 1, \cdots, m) \\
& x_j \geq 0 \quad (j = 1, \cdots, n)
\end{aligned}
\right.
\end{align}
标准形式的五个要素:
- 目标函数:求最大值(max)
- 约束条件:全部为等式约束(=)
- 决策变量:全部非负(x ≥ 0)
- 右端项:全部非负(b ≥ 0)
- 系数矩阵:任意实数
标准化方法
接下来以一个非标准形式线性规划问题为例介绍如何进行标准化。
例1:
\begin{align}
\min \quad & z = 3x_1 - 2x_2 + 5x_3 \\
\text{s.t.} \quad & \left\{
\begin{aligned}
& 2x_1 + x_2 - x_3 \leq 10 \\
& x_1 - 3x_2 + 2x_3 \geq 5 \\
& 4x_1 + 2x_2 + x_3 = -15 \\
& x_1 \geq 0,\ x_2 \leq 0,\ x_3 \text{ 无约束}
\end{aligned}
\right.
\end{align}
1、目标函数求最小值 → 转化为求最大值
最小化 $z$ 等价于最大化 $−z$,令 $z'=-z$ ,转化规则如下:
$$\min \, z = \mathbf{c}^T \mathbf{x} \ \Longleftrightarrow\ \max \, z' = -\mathbf{c}^T \mathbf{x}$$
例题应用:$$\min \, z = 3x_1 - 2x_2 + 5x_3 \ \Rightarrow\ \max \, z' = -3x_1 + 2x_2 - 5x_3$$
2、不等式约束→ 转化为等式
在约束为≤时引入非负松弛变量 $s_i$ 表示剩余的未使用资源,转化规则如下(实际题目通常用 $x_{n+1}, x_{n+2}, \dots$ 作为松弛/剩余变量):
$$\sum_{j=1}^{n} a_{ij}x_j \leq b_i \ \Longleftrightarrow\ \sum_{j=1}^{n} a_{ij}x_j + s_i = b_i,\ s_i \geq 0$$
例题应用:$$2x_1 + x_2 - x_3 \leq 10 \ \Rightarrow\ 2x_1 + x_2 - x_3 + x_4 = 10,\ x_4 \geq 0$$
在约束为≥时引入非负剩余变量 $s_i$ 表示超出需求的产量,转化规则如下:
$$\sum_{j=1}^{n} a_{ij}x_j \geq b_i \ \Longleftrightarrow\ \sum_{j=1}^{n} a_{ij}x_j - s_i = b_i,\ s_i \geq 0$$
例题应用:$$x_1 - 3x_2 + 2x_3 \geq 5 \ \Rightarrow\ x_1 - 3x_2 + 2x_3 - x_5 = 5,\ x_5 \geq 0$$
3、右端项为负→ 两边乘以-1
转化规则如下:
$$\sum_{j=1}^{n} a_{ij}x_j \geq b_i,\ b_i < 0 \ \Longleftrightarrow\ \sum_{j=1}^{n} (-a_{ij})x_j \leq -b_i,\ -b_i > 0$$
例题应用(等式约束):
$$-4x_1 + -2x_2 + -x_3 = 15$$
如果是不等式约束转化后要加入松弛/剩余变量
4、非正变量(x ≤ 0)→ 变量替换
转化规则如下:
$$x_j \leq 0 \ \Longleftrightarrow\ x_j = -x_j',\ x_j' \geq 0$$
例题应用:$$x_2 \leq 0 \ \Rightarrow\ x_2 = -x_2',\ x_2' \geq 0$$
替换后的影响:目标函数和约束条件中的$x_2$ 全部替换为 $-x_2'$
5、自由变量(无符号约束)→ 差分替换
因为任何实数都可以表示为两个非负数的差,引入两个非负变量,转化规则如下:
$$x_j \text{ 无约束 } \Longleftrightarrow x_j = x_j' - x_j'',\ x_j' \geq 0,\ x_j'' \geq 0$$
例题应用:$$x_3 \text{ 无约束 } \Longleftrightarrow x_3 = x_3' - x_3'',\ x_3' \geq 0,\ x_3'' \geq 0$$
替换后的影响:目标函数和约束条件中的$x_3$ 全部替换为 $x_3' - x_3''$
完整标准形式:
\begin{align}
\max \quad & z' = -3x_1 - 2x_2' - 5x_3' + 5x_3'' \\
\text{s.t.} \quad & \left\{
\begin{aligned}
& 2x_1 - x_2' - x_3' + x_3'' + s_1 = 10 \\
& x_1 + 3x_2' + 2x_3' - 2x_3'' - s_2 = 5 \\
& -4x_1 - 2x_2 - x_3' + x_3'' = 15 \\
& x_1, x_2', x_3', x_3'', s_1, s_2 \geq 0
\end{aligned}
\right.
\end{align}
基本原理
解的概念
解的分类层次:
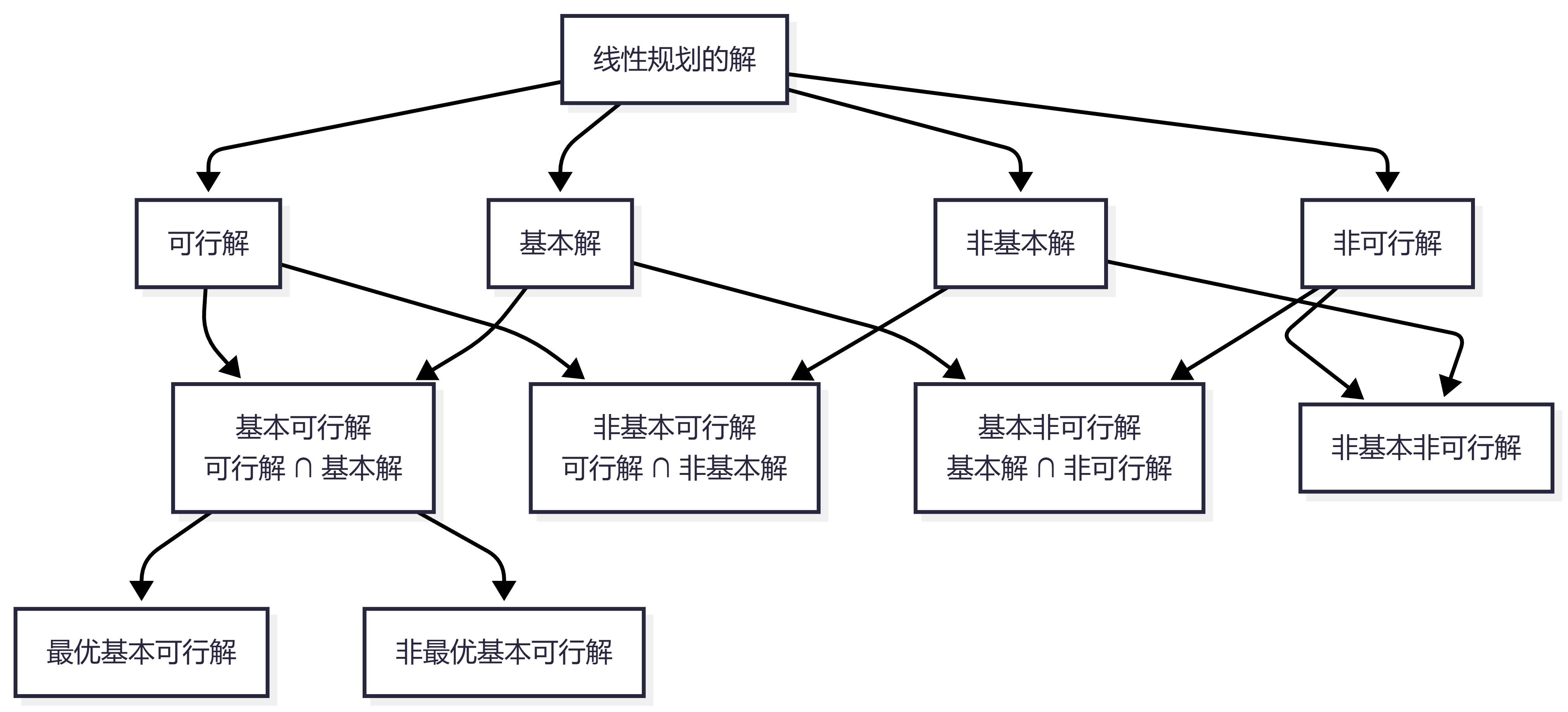
可行解(Feasible Solution):满足所有约束条件的解称为可行解。
可行域(Feasible Region):所有可行解的集合,可行域是 $n$ 维空间中的一个凸多面体。
最优解(Optimal Solution):在所有可行解中,使目标函数达到最大值(或最小值)的解称为最优解,可能不唯一。
基:一般线性规划问题的标准形式的约束方程是$Ax = b \quad (A\in\mathbb{R}^{m\times n},\; n>m)$其中:
- 秩$r(A)=m$,即行满秩,约束彼此独立。
- $n>m$意味着变量多于方程,故有无穷多解,需借助线性规划方法寻找最优解。
在 中任选 个线性无关的列,它们构成一个 的可逆矩阵:$B = \bigl(P_{j_1}, P_{j_2}, \dots, P_{j_m}\bigr)$这个 就称为线性规划问题的一个基。
基本解(Basic Solution):对于标准型线性规划$A\mathbf{x} = \mathbf{b}$,其中 $A$ 是 矩阵,$\operatorname{rank}(A) = m$。
步骤:
- 从 的 个列向量中选取 个线性无关的列向量,构成基矩阵
- 其余 个列向量对应的变量称为非基变量,令其为 0
- 求解方程组 $B\mathbf{x}_B = \mathbf{b}$,得到基变量 $\mathbf{x}_B$
- 得到的解 $\mathbf{x} = (\mathbf{x}_B, \mathbf{0})$ 称为基本解
基本可行解(Basic Feasible Solution, BFS):满足非负约束的基本解称为基本可行解,对应可行域的顶点(极点)。即:
\begin{align*}
\mathbf{x} = \begin{pmatrix} \mathbf{x}_B \\ \mathbf{0} \end{pmatrix}, \quad \mathbf{x}_B = B^{-1}\mathbf{b} \geq \mathbf{0}
\end{align*}
基本定理
定理1:若线性规划问题存在可行解,则问题的可行域是凸集
定理2:$X$ 是基本可行解 ⇔ $X$ 是可行域的顶点(极点)
定理3:如果线性规划问题有可行解且目标函数有界,则必存在最优解,且至少有一个最优解是基本可行解
求解方法
图解法
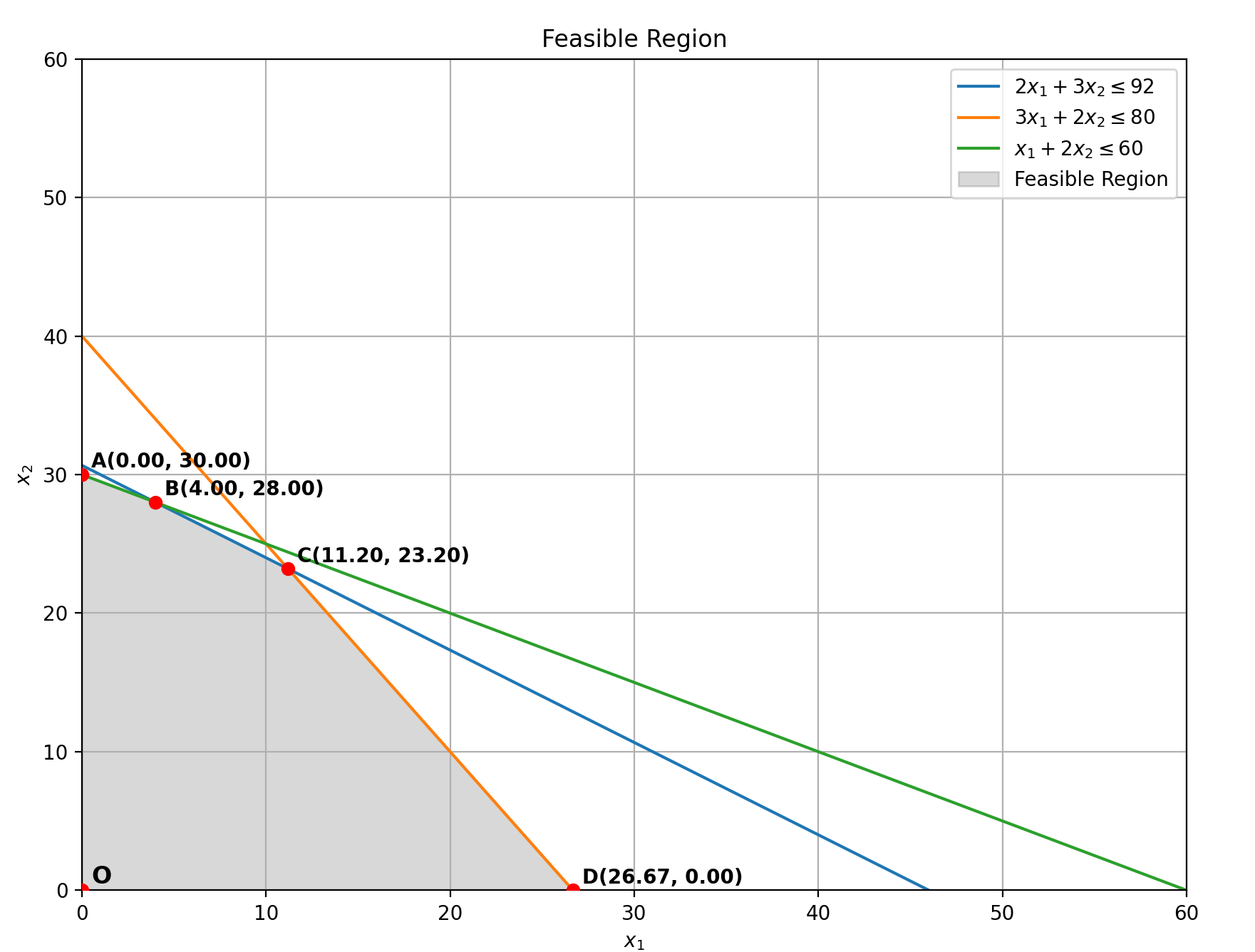
例2:
\begin{align}
\max \quad & z = 50x_1 + 60x_2 \\
\text{s.t.} \quad & \left\{
\begin{aligned}
& 2x_1 + 3x_2 \leq 92 \\
& 3x_1 + 2x_2 \leq 80 \\
& x_1 + 2x_2 \leq 60 \\
& x_1, x_2 \geq 0
\end{aligned}
\right.
\end{align}
图解法步骤:
一、建立坐标系
- 横轴:$x_1$(产品1的产量)
- 纵轴:$x_2$(产品2的产量)
二、绘制约束条件,寻找可行域
- 约束1:$2x_1 + 3x_2 \leq 92$
- 约束2:$3x_1 + 2x_2 \leq 80$
- 约束3:$x_1 + 2x_2 \leq 60$
可行域为所有约束的交集形成凸多边形(阴影区域):
可行域的顶点(按逆时针方向):
- O(0,0):原点
- A(0,30):约束3与纵轴的交点
- B(4,28):约束1与约束3的交点
- C(11.2, 23.2):约束1与约束2的交点
- D(33.33,0):约束1与横轴的交点
可行域如图所示:
三、绘制目标函数等值线,寻找最优解
绘制目标函数$z = 50x_1 + 60x_2$的平行线族(不同 $z$ 值)用来表示目标函数线的平行移动,与可行域最后接触的点即为最优解,如图所示:
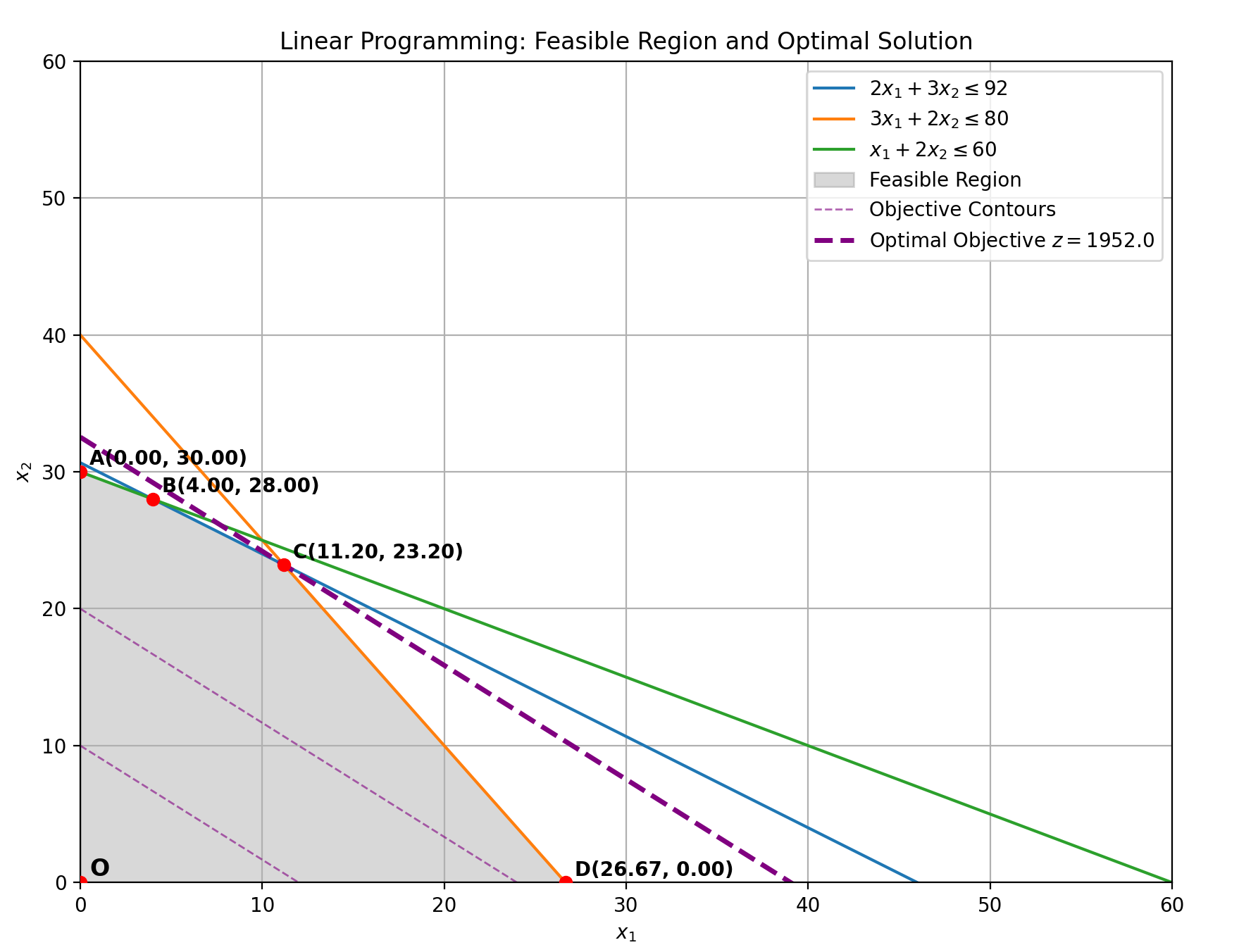
最优解:顶点 C(11.2,23.2),$max \quad z=1952.0$
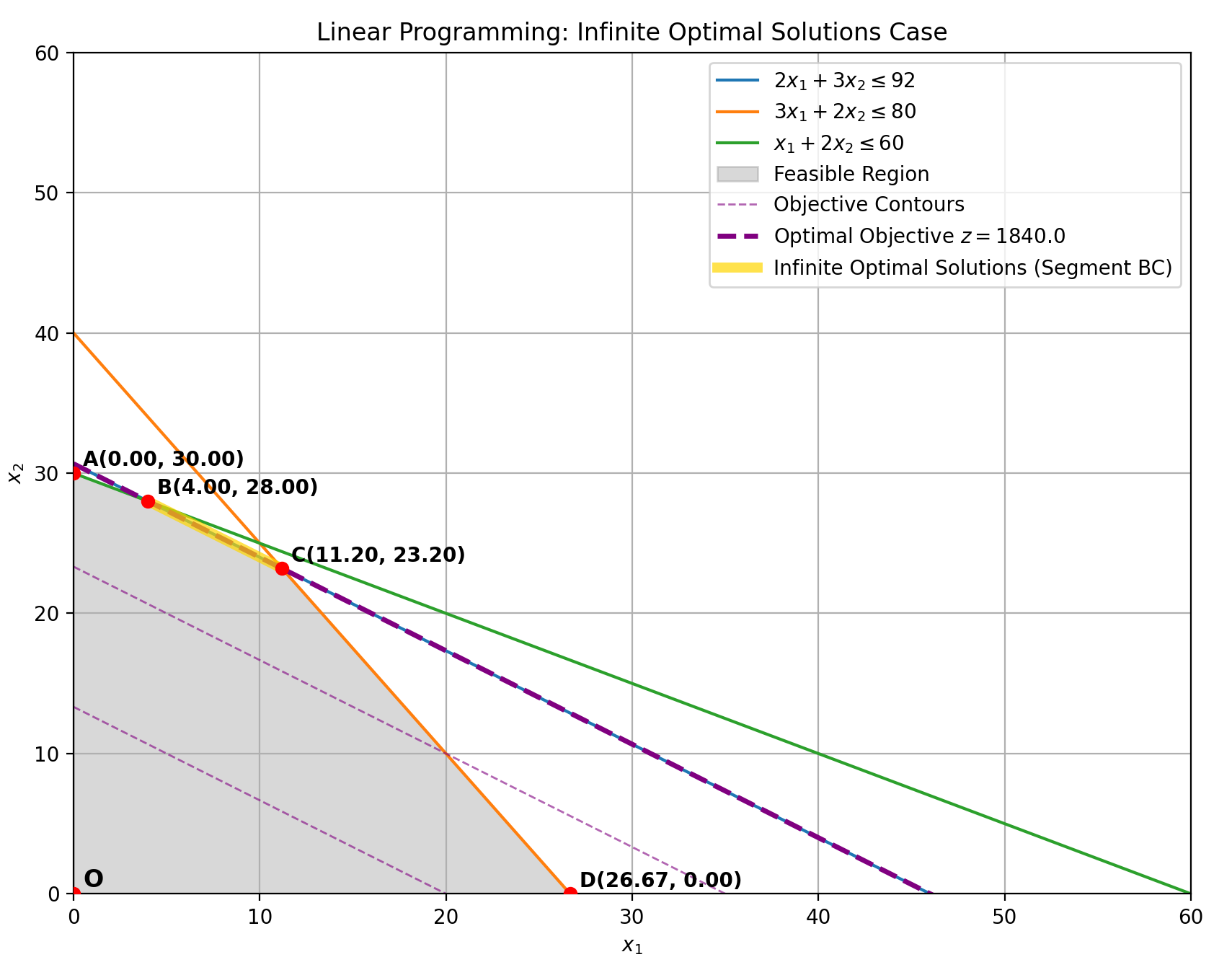
线性规划解的不同情况
1.唯一最优解:目标函数线与可行域在一个顶点相切。
2.无穷多最优解:目标函数线与一条边界线平行,该边上的所有点都是最优解,若例题中的目标函数改为$\max \quad z = 40x_1 + 60x_2$,则解的情况如图所示:
3.无界解:因为缺少关键约束,可行域无界,目标函数值可无限增大。
4.无可行解:约束条件相互矛盾,可行域为空集。
单纯形法
具体步骤
接着通过例2来讲解单纯形法的具体步骤,先将例2转化为标准型:
\begin{align}
\max \quad & z = 50x_1 + 60x_2 + x_3 + x_4 + x_5\\
\text{s.t.} \quad & \left\{
\begin{aligned}
& 2x_1 + 3x_2 + x_3 = 92 \\
& 3x_1 + 2x_2 + x_4 = 80 \\
& x_1 + 2x_2 + x_5 = 60 \\
& x_1, x_2, x_3, x_4, x_5\geq 0
\end{aligned}
\right.
\end{align}
一、列出初始基可行解和初始单纯形表
例2增广矩阵为
由于约束都是"≤"形式,引入的松弛变量系数矩阵为单位矩阵,构成一个基,对应变量$x_3 , x_4 , x_5$是基变量,令非基变量为零,初始基可行解为$\mathbf{X} = (0, 0, 92, 80, 60)^T$。若存在“≥”或“=”约束,或右端为负,需用两阶段法或大 M 法先解辅助问题。初始单纯形表如下:
\begin{array}{|c|c|c|ccccc|}
\hline
& & c_j & 50 & 60 & 0 & 0 & 0 & \\
\hline
C_B & X_B & b & x_1 & x_2 & x_3 & x_4 & x_5 \\
\hline
0 & x_3 & 92 & 2 & 3 & 1 & 0 & 0 \\
0 & x_4 & 80 & 3 & 2 & 0 & 1 & 0 \\
0 & x_5 & 60 & 1 & 2 & 0 & 0 & 1 \\
\hline
\end{array}
组成部分:
- 基变量列$\mathbf{X_b}$:$x_{1}, x_{2}, ..., x_{m}$
- $\mathbf{B}$ 是基矩阵,包含 $m$ 个线性无关的列
- 基变量系数列$\mathbf{C_B}$:$c_{1}, c_{2}, ..., c_{m}$表示当前基变量在目标函数里对应的系数
- 决策变量行:$x_1, x_2, ..., x_n$包含所有变量
- 系数矩阵区域:$a_{ij}$为约束系数,表示变量 $x_j$ 在第 $i$ 个约束中的系数
- 对于基变量,对应的列是单位向量
- b列:$b_i$表示约束的右端常数项
二、最优性检验
增加检验数行$\sigma_j$,计算公式为$\sigma_j = c_j - \sum_{i=1}^{m} c_Ba_{ij}$。所有检验数$\sigma_j≤0$,且基变量中不含有人工变量时,表中基可行解为最优解,表则称为最终单纯形表。如果存在至少一个非基变量检验数 = 0,则为多重解。如果存在 $\sigma_k > 0$且$a_{ik} \leq 0 \forall i$,则问题无界。
三、基变换,进行迭代
1.确认进基变量:检验数$\sigma_j>0$时,选择满足$\sigma_k = \max\{\sigma_j \mid \sigma_j > 0\}$的$x_k$作为进基变量。
2.确认出基变量: 根据$\theta = \min\left\{\frac{b_i}{a_{ik}} \mid a_{ik} > 0, i = 1,...,m\right\}=\frac{b_l}{a_{lk}}$计算得到的$x_{l}$为出基变量,主元素为${a_{lk}}$。在例2中${a_{32}}$为主元,加上方括号[]:
\begin{array}{|c|c|c|ccccc|c|}
\hline
& & c_j & 50 & 60 & 0 & 0 & 0 & \\
\hline
C_B & X_B & b & x_1 & x_2 & x_3 & x_4 & x_5 & \theta_i \\
\hline
0 & x_3 & 92 & 2 & 3 & 1 & 0 & 0 & 30.67 \\
0 & x_4 & 80 & 3 & 2 & 0 & 1 & 0 & 40 \\
0 & x_5 & 60 & 1 & [2] & 0 & 0 & 1 & 30 \\
\hline
& & {\sigma_j} & 50 & 60 & 0 & 0 & 0 \\
\hline
\end{array}
3.迭代(用进基变量$x_k$替换出基变量$x_{l}$得到一个新基)并作出出新单纯形表:
将主元${a_{lk}}$所在的$k$列$\mathbf{P_k}$转化为单位向量:
- $l$行所在的数字全部除以主元${a_{lk}}$
- 通过初等行变换将主元${a_{lk}}$所在$k$列上的数字变成0(除主元以外)
例2经过第一次迭代后单纯形表如下:
\begin{array}{|c|c|c|ccccc|c|}
\hline
& & c_j & 50 & 60 & 0 & 0 & 0 & \\
\hline
C_B & X_B & b & x_1 & x_2 & x_3 & x_4 & x_5 & \theta_i \\
\hline
0 & x_3 & 2 & 1/2 & 0 & 1 & 0 & -3/2 & 4 \\
0 & x_4 & 20 & 2 & 0 & 0 & 1 & -1 & 10 \\
60 & x_2 & 30 & 1/2 & 1 & 0 & 0 & 1/2 & 60 \\
\hline
& & \sigma_j & 20 & 0 & 0 & 0 & -30 & \\
\hline
\end{array}
4.重复二、三步直到计算结束。
例2的最终单纯形表如下:
\begin{array}{|c|c|c|ccccc|}
\hline
& & c_j & 50 & 60 & 0 & 0 & 0 \\
\hline
C_B & X_B & b & x_1 & x_2 & x_3 & x_4 & x_5 \\
\hline
50 & x_1 & 56/5 & 1 & 0 & -2/5 & 3/5 & 0 \\
0 & x_5 & 12/5 & 0 & 0 & -4/5 & 1/5 & 1 \\
60 & x_2 & 116/5 & 0 & 1 & 3/5 & -2/5 & 0 \\
\hline
& & \sigma_j & 0 & 0 & -16 & -6 & 0 \\
\hline
\end{array}

Comments NOTHING